Какая булева операция произведена на рисунке ниже. Логические операции и их свойства. Создание вложенных булевых объектов
Термин «булева операция» в математике используется для обозначения операций сравнения между множествами. В 3D Studio MAX аналогичные операции сравнения применяются в отношении совмещающихся или перекрывающихся геометрических объектов сцены. Булева операция осуществляется путем создания булева составного объекта из двух существующих объектов данные объекты называются операндами и обязательно должны пересекаться в некоторой области пространства. Операнды представлены в виде отдельных объектов на всей стадии редактирования булева составного объекта, что позволяет при необходимости выбирать и модифицировать их и даже выполнять анимацию.
Теоретические основы булева моделирования
В 3D Studio MAX предусмотрены пять типов булевых операций (рис. 1):
- Union (Объединение) результатом операции является объект, который получается вследствие объединения двух исходных объектов; при этом части объектов, оказавшиеся внутри общего внешнего объема, удаляются;
- Intersection (Пересечение) полученный объект является результатом пересечения двух исходных объектов; при этом части объектов, оказавшиеся вне общего внутреннего объема, удаляются;
- (Вычитание (A-B)/Вычитание (B-A)) результатом является объект, полученный посредством вычитания одного объекта из второго, все части которого отсекаются объемом первого и удаляются;
- Cut (Вырезание) полученный объект является результатом вырезания на поверхности первого объекта в местах пересечения со вторым объектом соответствующих отверстий и проемов.
Булевы объекты являются разновидностью составных объектов и поэтому принадлежат к группе Compound Objects (Составные Объекты) из категории Geometry (Геометрия) на панели Create (Создать). Технология создания булева объекта состоит из двух этапов предварительной подготовки исходных объектов и последующего применения к ним требуемой булевой операции, причем перед применением последней один из исходных объектов обязательно должен быть выделен, иначе операция Boolean окажется недоступной.
Существует несколько методов создания булевых объектов:
- Copy (Копия) при создании булева объекта сохраняется оригинал операнда В;
- Move (Перенос) при создании булева объекта оригинал операнда В не сохраняется;
- Instance (Образец) создается Boolean-объект и одновременно сохраняется копия операнда В; при изменении копии булев объект будет изменяться, а при изменении булева объекта будет меняться копия;
- Reference (Ссылка) создается Boolean-объект и одновременно сохраняется копия В-операнда; если при этом изменять оригинал, то Boolean-объект тоже изменится; если же изменять Boolean-объект, то оригинал при этом изменяться не будет.
- Результат булевой операции не всегда оказывается удачным, поэтому следует соблюдать ряд условий:
- исходные объекты должны пересекаться в некоторой области пространства, причем характер пересечения нужно тщательно отрегулировать в окнах проекций;
- исходные объекты должны иметь достаточное количество сегментов и быть сглаженными, иначе результат окажется слишком грубым или совсем не соответствующим задуманному;
- каркасы должны быть построены правильно грани, совместно использующие ребро, должны совместно использовать и две вершины, а ребро может совместно использоваться только двумя гранями. Для редактируемых сеток может потребоваться объединение совпадающих вершин вручную в режиме Edit Mesh .
Для примера попробуйте создать булеву операцию вычитания на примере трех перекрывающихся сфер (рис. 2). Выделите центральную сферу, на панели Create установите категорию объектов Geometry , в списке типов объектов укажите тип Compound Objects (Составные Объекты), щелкните по кнопке Boolean и установите операцию Subtraction (A-B) . Обратите внимание, что в начальный момент оказывается определенным лишь операнд A (рис. 3), поэтому для указания операнда B щелкните по кнопке Pick Operand B (Выбрать операнд B), а затем укажите мышью самую большую из сфер. В итоге в сфере, использованной в качестве операнда A, появится выемка (рис. 4). Если операнд B был задан неправильно, не следует сразу же вновь щелкать по кнопке Pick Operand B и указывать другой объект (хотя программа это позволяет), поскольку объект, неудачно выбранный как операнд B , не восстановится (рис. 5). В таких ситуациях нужно сначала отменить предыдущий выбор операнда B командой Undo и только потом сделать новый выбор.




Моделирование при помощи булева объединения
Как правило, булево объединение используется в отношении объектов, которые должны выглядеть сплошными, то есть их поверхность всегда закрыта, а внутренняя структура для сцены неактуальна. Булево объединение позволяет избавиться от видимости соединения объектов между собой и полезно в тех случаях, когда пересечение видимо. Если же пересечение двух объектов скрыто, то в применении булевой операции объединения нет необходимости.
Для примера попробуем последовательно объединить три стандартных примитива две сферы и цилиндр в форму гантели. Создайте исходные объекты и разместите их по отношению друг к другу нужным образом (рис. 6 и 7). Выделите цилиндр, активируйте булеву операцию Union , для определения операнда B щелкните по кнопке Pick Operand B (Выбрать операнд B ), а затем укажите мышью одну из сфер. В итоге цилиндр и сфера станут единым объектом. Выделите объединенный объект, активизируйте режим создания булевых объектов, щелкните по кнопке Pick Operand B (Выбрать операнд B ) и укажите вторую сферу. Результатом станет получение одного единственного булева объекта (рис. 8).



Моделирование при помощи булева вычитания
Булевы операции вычитания наиболее широко используются при моделировании. Чаще всего они применяются для создания закруглений и углублений на первом из исходных объектов, а также выемок и сквозных отверстий в нем, и потому второй объект условно можно считать своеобразной стамеской или фрезой, которая создает желобок на первом объекте или выбирает какую-то его часть. В качестве «режущих инструментов» могут быть задействованы самые разные объекты, в частности объекты, полученные из криволинейных сплайнов путем лофтинга или вращения.
На первом этапе воспользуемся булевой операцией вычитания для формирования цилиндрического отверстия внутри шара. Создайте исходные объекты в виде шара и цилиндра (радиус сечения цилиндра должен быть меньше радиуса шара, а его длина больше радиуса шара) и выровняйте их друг в отношении друга по осям X, Y и Z, применив операцию Align (Выровнять) (рис. 9). Проведите рендеринг и сразу же скорректируйте параметры объектов так, чтобы они оказались достаточно гладкими, особенно в области пересечения; если этого не сделать, то созданный булев объект тоже не будет иметь надлежащей гладкости. В данном случае видно (рис. 10), что степень гладкости требуется увеличить это достигается путем повышения плотности объектов: увеличения количества сегментов и сторон сегментов и уменьшения размера сегментов (рис. 11). В то же время при работе со сложными моделями для ускорения процесса моделирования в ряде случаев лучше увеличивать плотность объектов, задействованных в качестве операндов, не перед созданием булевой операции, а после в ходе редактирования операндов на уровне объектов.



Выделите цилиндр, установите режим создания булевых объектов, установите операцию Subtraction (B-A) (Вычитание B-A), для указания операнда B щелкните по кнопке Pick Operand B (Выбрать операнд B ) и укажите сферу. Это приведет к удалению внутренней части сферы точно по размеру исходного цилиндра таким образом, что в сфере появится сквозное отверстие (рис. 12).

Формируемые при помощи булева вычитания отверстия могут иметь самую разную форму, а результат зависит не только от размеров и формы объектов, но и от положения их в отношении друг друга, а также от того, какой из объектов был указан первым. Возьмите в качестве исходных объектов куб и шар и разместите их показанным на рис. 13 образом. Выделите куб, установите в режиме создания булевых объектов операцию Subtraction (A-B) и в качестве операнда B укажите сферу результатом станет появление в ней соответствующего углубления (рис. 14), а потом сохраните результат (он нам позже потребуется). Отмените созданную булеву операцию и примените к исходным объектам булево вычитание Subtraction (A-B) , но в качестве первого операнда укажите сферу и вместо куба с углублением итогом операции окажется шар, в котором как бы вырезана одна из его четвертей (рис. 15). Стоит отметить, что для получения того же самого результата совсем не обязательно было менять местами операнды: с таким же успехом можно было вместо операции Subtraction (A-B) выбрать операцию Subtraction (B-A) . Подобная взаимозамена операций Subtraction (A-B) и Subtraction (B-A) очень удобна, так как при неверном выборе операнда A не потребуется отменять операцию, а достаточно лишь переключиться с одной операции вычитания на другую.



Как было отмечено, форма получающейся выемки определяется вторым операндом. Попробуйте вместо шара создавать выемки и углубления другими объектами. Например, при применении объекта Hose (Шланг) (рис. 16) может быть получена резьбообразная выемка (рис. 17). Если же взять в качестве операнда B граненую призму Gengon (рис. 18), то выемка окажется многогранной (рис. 19), а при использовании веретена Spindle скошенной (рис. 20 и 21) и т.п.






Булева операция Intersection (Пересечение) является обратной к булевым операциям Subtraction (A-B)/Subtraction (B-A) (Вычитание (А-В)/Вычитание (В-А), так как получаемые с ее помощью булевы объекты представляют собой фрагменты операндов A и B, которые удаляются при операции булева вычитания, если ее провести в отношении тех же самых объектов. Возьмите в качестве исходных рассмотренные выше куб и шар, выберите куб в качестве операнда A , а затем проведите булеву операцию Intersection (Пересечение) результатом будет получение четверти шара, которая ранее оказывалась вырезанной в ходе операции Subtraction (B-A) (рис. 22).
Рис. 22. Исходные объекты и булевы объекты при операциях Intersection и Subtraction (В-А)
Более интересные варианты поверхностей создаются при использовании в качестве операнда B скрученных объектов. Можно попробовать получить подобный объект на основе примитива Torus , в исходном состоянии имеющего такой вид, как на рис. 23, а после скручивания (параметр Twist ) на 360° как на рис. 24. Дополнительно создайте цилиндр, разместите объекты, как показано на рис. 25, и при выполнении булевой операции Subtraction (A-B) укажите цилиндр как операнд A результат представлен на рис. 26.




Создание вложенных булевых объектов
Теоретически для одного и того же объекта (который используется в качестве операнда A в булевой операции) можно выполнить любое число булевых операций, причем каждая операция создает собственный набор операндов, вложенных друг в друга. В таких случаях одним из исходных объектов новой булевой операции будет являться булев объект, полученный в ходе предыдущей булевой операции.
Для примера возьмите ранее созданный и сохраненный булев объект (рис. 27), создайте еще один цилиндр и разместите его так, как показано на рис. 28. Выделите исходный булев объект (для этого придется выйти из списка Compound Objects (Составные объекты) путем выбора геометрии другого типа), активируйте булеву операцию вычитания Subtraction (A-B) и вторым операндом укажите отдельный цилиндр в кубе появится еще одна выемка (рис. 29). Полученный булев объект можно использовать для новой булевой операции, например вырезав в нем пирамидой треугольную выемку (рис. 30 и 31).



Рис. 29. Результат первой вложенной булевой операции


Редактирование булева объекта
У созданного булева объекта можно изменить цвет; объект можно перемещать, масштабировать и поворачивать обычным образом. При необходимости в области параметров на панели Modify можно откорректировать имена операндов, установить способ отображения булева объекта и определить особенности его обновления при редактировании. Работая со сложными моделями, которые долго перерисовываются, иногда лучше отказаться от автоматического режима обновления в пользу ручного режима Manually (Вручную) тогда для перерисовки модели нужно будет щелкать по кнопке Update (Обновить).
Здесь же можно установить опцию Hidden Ops , которая позволяет при просмотре результата видеть в виде сетки операнд, исчезающий при выполнении булевой операции (рис. 32). Данная опция служит для информации о точном местонахождении операнда и о его влиянии на булеву операцию и часто используется при создании анимации.

Кроме того, булев объект можно редактировать на уровне операндов. Рассмотрим это на примере изучения взаимосвязи между положением операндов по отношению друг к другу и внешним видом булева объекта. Создайте в качестве исходных объектов два цилиндра и разместите их так, как показано на рис. 33. Выделите меньший из объектов, установите булеву операцию вычитания Subtraction (B-A) и вторым операндом укажите другой цилиндр, вследствие чего в большем цилиндре появится отверстие (рис. 34). Данное отверстие не будет сквозным, что обусловлено исходным положением цилиндров.


Полученный результат можно изменить, причем для этого даже не потребуется отменять булеву операцию, поскольку операнды булева объекта в определенной степени редактируемы, причем независимо друг от друга: их можно выделять, перемещать, масштабировать и поворачивать по отношению друг к другу, меняя таким образом сам булев объект. Редактирование операндов осуществляется в режиме Sub-Object , для перехода в который нужно при выделенном булевом объекте раскрыть свиток Boolean панели Modify , подсветить строку Operands , а затем указать редактируемый операнд (рис. 35) и произвести над ним нужные манипуляции. При перемещении операнда или любой другой манипуляции над ним в проекции Perspective будет сразу же отображаться обновленный булев результат. Для примера переместите в окне проекции Left операнд A влево по мере перемещения глубина отверстия будет увеличиваться (рис. 36), а при обратном перемещении уменьшаться (рис. 37). Если продолжить перемещение операнда A влево, то в конце концов отверстие станет сквозным (рис. 38), а при обратном движении превратится в едва заметную выемку (рис. 39).





Аналогичным способом можно не только перемещать и поворачивать операнды, но и менять их размеры. Попробуйте для операнда A провести масштабирование инструментом Select and Uniform Scale таким способом можно менять размеры выемки, например сделать ее очень большой по диаметру (рис. 40) или, наоборот, очень маленькой. Для того чтобы вернуться из режима редактирования операндов в режим редактирования булева объекта, нужно подсветить в палитре Modify строку Boolean после этого операции масштабирования, перемещения и поворота будут относиться ко всему булеву объекту в целом.

Операнды можно редактировать и на уровне объектов: менять длину, ширину, высоту, число сегментов и т.п. Чтобы перевести булев объект в режим редактирования на уровне объекта, на палитре Modify следует активировать строку Operands , выбрать нужный операнд, а затем в списке Boolean щелкнуть на строке под строкой Operands , где, например, в случае использования примитивов будет фигурировать имя примитива в общем виде (рис. 41).

Примеры объектов, полученных с использованием булева моделирования
Пиала
Создайте в качестве исходных объектов шар и параллелепипед (Box ) и разместите их так, как показано на рис. 42. Шар в окне Perspective не виден, так как его верхняя часть находится внутри параллелепипеда, а нижняя оказалась скрыта. Выделите параллелепипед и примените к нему булеву операцию вычитания Subtraction (B-A) , указав шар вторым операндом, в итоге останется только нижняя половина шара (рис. 43). Выделите созданный булев объект, конвертируйте его в редактируемую сетку, выбрав из контекстного меню команду Convert To=>Convert to Editable Mesh (Конвертировать в => Конвертировать в редактируемую сетку), и перейдите в режим редактирования полигонов. Поскольку работа предстоит довольно кропотливая, перейдите в режим отображения одной проекции, щелкнув на кнопке Min/Max Toggle (рис. 44).



Теперь потребуется последовательное применение операций Bevel , масштабирования и Extrude (Вытеснение). Вначале сделайте фаску, установив значение справа от Bevel (Фаска) равным примерно –1 (рис. 45). Затем примените операцию масштабирования и уменьшите выделенную часть объекта, а потом удалите самый верхний фрагмент половины шара посредством операции Extrude (рис. 46). Нанесите небольшую фаску для скашивания удаляемой поверхности, еще раз проведите масштабирование и примените операцию Extrude и действуйте так до тех пор, пока заготовка не станет напоминать грубую чашу (рис. 47). Для сглаживания поверхности примените модификатор MeshSmooth (Сглаживание сетки) возможно, в итоге пиала станет напоминать представленную на рис. 48.




Примерно такую же пиалу можно получить и более быстрым способом, но тоже с применением булевых операций. Возьмите в качестве основы полученную выше в ходе булева вычитания нижнюю половину сферы (рис. 49), создайте ее копию, потом немого уменьшите ее в размерах инструментом Select and Uniform Scale , выровняйте по осям X, Y и Z, щелкнув по кнопке Align (рис. 50), а затем слегка переместите вверх. Выделите меньшую полусферу и создайте новый булев объект с помощью булева вычитания Subtraction (B-A) , указав в качестве операнда B большую полусферу (рис. 51). Полученная после сглаживания пиала представлена на рис. 52.




Волчок
Создайте конус (Cone ) (рис. 53). Сформируйте объект Box (Коробка) и выровняйте его командой Align по конусу по осям X, Y и Z (рис. 54). Сделайте копию второго объекта, а затем разместите объекты, как показано на рис. 55. Выделите конус, установите в режиме создания булевых объектов операцию Subtraction (A-B) и в качестве операнда B укажите объект Box 01 (рис. 56). Затем повторите данную операцию, но операндом A в этом случае станет созданный перед этим булев объект, а операндом B объект Box 02 (рис. 57). Создайте новый конус с параметрами, указанными на рис. 58, а затем выровняйте его по булеву объекту по осям X, Y и Z (рис. 59).







Выделите булев объект и сделайте его зеркальное отображение по оси Z с формированием копии, щелкнув по кнопке Mirror Selected Object (Зеркальное отображение выделенного объекта), и настройте параметры зеркального отображения (рис. 60). Точно таким же образом сделайте зеркальную копию конуса получится волчок (рис. 61).


Ключ
Попытаемся создать имитацию ключа, предварительно сформировав все его детали путем лофтинга, а затем объединив их при помощи булевой операции. Создайте серию сплайнов примерно такого вида, как на рис. 62: прямоугольник предназначен для использования в качестве сечения loft-объекта, а все остальные сплайны будут играть роль пути. Обратите внимание, что при создании лофт-объектов в данном случае нужно выбрать метод указания сечения, а не пути иначе после их получения придется потратить много времени на размещение loft-объектов нужным образом. Выделите первую окружность, щелкните по кнопке Geometry Create Compound Objects Object Type (Тип объекта) щелкните на кнопке Loft (Лофтинговый), затем по кнопке Get Shape (Указать путь), и укажите мышью прямоугольник. Выделите вторую окружность и вновь создайте лофтинговый объект, указав в качестве сечения тот же самый прямоугольник. Точно таким же способом создайте лофтинговые объекты для всех остальных сплайнов (рис. 63).


Теперь нужно превратить отдельные фрагменты ключа в единый объект, что проще всего сделать с помощью создания вложенного булева объекта. Выделите первый loft-объект, активизируйте булеву операцию Union , щелкните на кнопке Pick Operand B и укажите второй loft-объект. Создайте новый булев объект, задействовав полученный булев объект как операнд A, а один из loft-объектов как операнд B и продолжайте до тех пор, пока не объедините все фрагменты ключа. Окончательный результат показан на рис. 64.

Оконная рама
Комбинируя операции лофтинга и булева объединения (как в примере с ключом), можно сформировать очень много объектов такого вида, как оконные рамы, дверные проемы и т.п., каждый из которых представляет собой несколько состыкованных между собой отдельных элементов. Например, попробуйте сначала создать окно из серии отдельных сплайнов (рис. 65), затем превратите каждый сплайн в лофтинговый элемент, а потом соедините фрагменты рамы между собой булевым объединением (рис. 66).


Кружка с ручкой
Для основы кружки создайте цилиндр (рис. 67) и конвертируйте его в редактируемую сетку, выбрав из контекстного меню команду Convert to=>Convert to Editable Mesh (Конвертировать => Конвертировать в режим редактирования сетки). Активируйте режим редактирования вершин Vertex и выделите внутренние вершины только верхнего сечения (рис. 68) проще всего выделить все внутренние вершины (верхнего и нижнего сечений) на проекции Top , а затем при нажатой клавише Alt исключить вершины нижнего сечения на проекции Front . Перетащите на проекции Front выделенные вершины инструментом Select and Move вниз таким образом, чтобы сформировалась внутренняя пустая полость кружки (рис. 69). Не снимая выделения, активируйте инструмент Select and Uniform Scale и отмасштабируйте выделенную область так, чтобы внутренние вершины совпали в вершинами промежуточного яруса (рис. 70), а внутренняя полость кружки стала одинаковой по диаметру как в верхней части кружки, так и в нижней.




На проекции Top выделите внутренние вершины верхнего и среднего сечений (рис. 71) это удобнее осуществить, вначале выделив все внутренние вершины с областью выделения Circular Selection Region , а затем исключив вершины нижнего сечения при нажатой клавише Alt областью выделения Rectangular Selection Region . Отмасштабируйте их на проекции Top так, чтобы радиус, на котором они расположены, приблизился к внешнему радиусу, а толщина стенки кружки уменьшилась (рис. 72). На проекции Front выделите оказавшиеся в ходе масштабирования за пределами объекта вершины верхнего сечения (рис. 73) и переместите их вниз (рис. 74). Аналогичную операцию проведите в отношении внутренних вершин нижнего сечения (рис. 75).





Для создания ручки к кружке активизируйте категорию объектов Shapes (Формы) командной панели Create (Создание), в списке разновидностей объектов укажите тип Splines (Сплайны) и инструментом Line (Линия) постройте криволинейный сплайн (рис. 76), который будет использован как путь при построении лофтингового объекта. Создайте эллипс для использования в качестве сечения loft-объекта. Выделите эллипс, щелкните по кнопке Geometry (Геометрия) командной панели Create (Создать) и выберите в раскрывающемся списке разновидностей объектов вариант Compound Objects (Составные объекты). В свитке Object Type (Тип объекта) щелкните по кнопке Loft (Лофтинговый), потом по кнопке Get Path (Указать путь) и укажите мышью предварительно созданный сплайн пути. Поместите созданную ручку на ее место, отрегулировав ее положение на всех проекциях (рис. 77). Рассмотрев объект со всех сторон, вы увидите, что некоторые фрагменты ручки выступают в полости кружки, а потому их стоит удалить. Для этого конвертируйте ручку в режим редактируемой сетки, выделите лишние вершины (рис. 78) и нажмите клавишу Del .



Чтобы кружка и ручка стали единым целым, нужно объединить их при помощи булевой операции. Выделите кружку, установите выполнение операции Union , щелкните по кнопке Pick Operand B , а затем по ручке объекты объединятся. При этом на панели Modify будет видно, что исходными элементами булевой операции является объект типа Editable Mesh (Редактируемая сетка) и loft-объект (рис. 79). Подберите для булева объекта нужные параметры сглаживания и проведите рендеринг линия соединения ручки с кружкой станет практически незаметной (рис. 80).


Головка для накидного гаечного ключа
Заготовкой для данного объекта будут два цилиндра разного диаметра, состыкованных между собой в ходе булевой операции объединения. Внутри полученного на их основе объекта требуется вырезать несколько разных по сечению полостей, что возможно путем многократных булевых вычитаний. Первую вырезаемую полость получим из лофтингового объекта, сформированного движением звезды с большим числом лучей по прямой, а остальные с помощью примитивов.
Создайте два цилиндра и соедините их между собой булевой операцией объединения (рис. 81). Затем создайте два сплайна звезду и линию (рис. 82), выровняйте звезду относительно большего цилиндра по осям X, Y и Z (рис. 83). Создайте loft-объект, указав линию в качестве пути, отрегулируйте его положение относительно объекта из цилиндров (рис. 84). Вырежьте соответствующую полость из большого цилиндра, выделив многогранный лофтинговый объект, активировав булеву операцию вычитания Subtraction (A-B) и указав цилиндры в качестве операнда B , в результате чего внутри большого цилиндра появится многогранная полость (рис. 85).





Создайте параллелепипед, ширина и высота которого одинаковы и по размеру немного меньше диаметра вырезанной полости. Поместите его внутрь большего цилиндра и выровняйте по осям X и Z (рис. 86). На основе уже созданного булева объекта и параллелепипеда сформируйте вложенный булев объект, вырезав параллелепипедом соответствующую полость внутри большого цилиндра (рис. 87). Затем создайте цилиндр с меньшим радиусом, чем радиус меньшего из уже имеющихся цилиндров, поместите его внутрь меньшего цилиндра и выровняйте по осям X и Z (рис. 88). Вырежьте данным цилиндром полость внутри меньшего из цилиндров вложенного булева объекта при помощи операции булева вычитания и получите деталь, представленную на рис. 89, которая будет иметь примерно такой же вид, как головка для накидного гаечного ключа.



Над телами, как и над другими геометрическими объектами, можно выполнять операции - совокупность действий над одним или несколькими исходными телами, которая приводит к рождению нового тела. Одними из основных операций для двух тел являются булевы операции.
Булевыми операциями называют операции объединения, пересечения и вычитания тел, так как они выполняют одноименные операции над внутренними объемами тел (над множествами точек пространства, находящимися внутри тел). Булеву операцию объединения тел будем обозначать формулой , где - исходные тела, S - результирующее тело. Булеву операцию пересечения тел будем обозначать формулой . Булеву операцию вычитания тел будем обозначать формулой . В порядке следования тел-операндов будем называть их первым телом и вторым телом.

Рис. 6.6.1. Два исходных тела

Рис. 6.6.2. Объединение тел
Результатом операции объединения двух тел является тело, которое содержит точки, принадлежащие внутреннему объему или первого, или второго тела. Результатом операции пересечения двух тел является тело, которое содержит точки, принадлежащие внутреннему объему как первого, так и второго тела.
Результатом операции вычитания двух тел является тело, которое содержит точки, принадлежащие внутреннему объему первого, но не принадлежащие внутреннему объему второго тела.
На рис. 6.6.1 приведены исходные для булевой операции тела. На рис. 6.6.2 приведен результат операции объединения тел, на рис. 6.6.3 приведен результат операции пересечения, на рис. 6.6.4 и 6.6.5 приведены результаты операции вычитания тел.
Операцию вычитания тел можно свести к операции пересечения тел; для этого нужно вывернуть второе тело наизнанку и найти точки его объема, одновременно принадлежащие и объему первого тела. Вывернутое наизнанку тело S будем обозначать

Рис. 6.6.3. Пересечение тел

Рис. 6.6.4. Разность тел

Рис. 6.6.5. Разность тел
При выворачивании тела наизнанку внутренние стороны граней становятся наружными сторонами, а наружные - внутренними и изменяются направления циклов на противоположные, в результате чего внутренним объемом тела становится та часть пространства, которая до этого находилась снаружи тела. Математически операция вычитания сводится к операции пересечения тел Конструктор при проектировании использует операции объединения и вычитания (они могут называться по-другому, например, операции сварки и сверления), а математический аппарат выполняет соответственно операции объединения и пересечения. Все булевы операции содержат много общего и выполняются по единому алгоритму.
Объединение тел.
Рассмотрим булеву операцию объединения тел. Кратко суть операции можно описать следующим образом: нужно найти линии пересечения граней тел, удалить ту часть первого тела, которая попала внутрь второго тела и ту часть второго тела, которая попала внутрь первого тела, а из всего остального построить новое тело. Операцию условно разобьем на три этапа. На первом этапе построим линии пересечения поверхностей граней и на их базе - новые ребра. Построенные новые ребра будем называть ребрами пересечения, а ребра тел будем называть старыми ребрами. На втором этапе определим точки пересечения новых ребер со старыми ребрами и в этих точках разрежем старые ребра на несколько ребер. На третьем этапе операции перестроим циклы пересекшихся граней. После этого добавим к пересекшимся граням тел грани, топологически связанные ними. Рассмотрим этапы построения тела более подробно.
Первый этап операции объединения тел начнем с того, что построим линии пересечения каждой грани первого тела с каждой гранью второго тела, если таковые имеются. Для этого используем алгоритм пересечения поверхностей граней.
Пусть грани первого тела описываются поверхностями
а грани второго тела описываются поверхностями
На базе линий пересечения граней первого и второго тел
 (6.6.3)
(6.6.3)
построим ребра пересечения. При этом ребрам пересечения дадим направление векторного произведения нормали грани первого тела с нормалью грани второго тела: Направление ребра определяется признаком совпадения направления производной линии пересечения с требуемым направлением ребра. За положительное направление нормали грани примем направление наружу тела. Нормаль грани может совпадать с нормалью ее поверхности или иметь противоположное направление в зависимости от признака их совпадения. На рис. 6.6.6 показаны направления ребер пересечения грани первого тела с двумя гранями второго тела.

Ребра пересечения должны быть построены так, чтобы они полностью лежали внутри циклов граней исходных тел. Ребра пересечения могут подходить к границам грани только своими концами. В точках А, В и С (рис. 6.6.6) старые ребра граней должны быть разбиты каждое на два ребра, так как в результирующее тело войдет только часть исходной грани.
На втором этапе разрежем старые ребра тела, к которым подходят ребра пересечения. Резка старого ребра осуществляется путем рассечения кривой, на которой базируется ребро. Из одной кривой получим две кривые, в совокупности заменяющие исходную кривую ребра. Одна из этих кривых останется геометрическим носителем разрезаемого ребра, а на базе второй построим новое ребро, которое получит от исходного ребра всю необходимую информацию. Как было сказано, каждое ребро строится на базе кривой пересечения поверхностей (6.1.1). Кривую пересечения поверхностей составляют две поверхности и две соответствующие им двухмерных кривые. Рассечению подлежат именно двухмерные кривые на двух разных поверхностях. Как до, так и после рассечения эти кривые должны иметь одинаковые области определения параметров и соответствие точек при всех значениях параметра.
Точки пересечения нового ребра со старым ребром грани ищутся как точки пересечения двухмерных кривых, заданных на общей для них плоскости параметров. От каждого ребра в формуле (4.8.6) точек пересечения линий участвует по одной двухмерной кривой, входящей в линию пересечения.
Параметры точек пересечения ребер и сами координаты кривых, являющиеся параметрами поверхности, должны быть определены с заданной точностью.
Если разрезаемое ребро базируется на кривой пересечения, заданной отдельными точками (двухмерные линии являются ломаными и точно совпадают в пространстве только в характеристических точках), то прежде чем разрезать такую кривую, нужно в обе линии вставить дополнительные точки, соответствующие точки пересечения трех поверхностей - двух поверхностей, лежащих по обе стороны разрезаемого ребра, и поверхности грани другого исходного тела. Например, если режется линия пересечения поверхностей поверхностью , то в линии нужно вставить дополнительные двухмерные характеристические точки, соответствующие пересечению поверхностей . Задача пересечения трех поверхностей сводится к решению системы шести скалярных уравнений (4.12.5) относительно шести параметров . Начальное приближение решения известно достаточно точно.
Так как каждое ребро исходных тел входит в циклы двух смежных граней, то после резки ребер исходных тел необходимо произвести корректировку этих циклов с учетом разрезанных ребер.
После первых двух этапов мы получили совокупность ребер пересечения, ориентированных определенным образом, стыкующихся друг с другом и с ребрами исходных тел только в вершинах. Далее необходимо перестроить циклы пересекшихся граней.
Третий этап завершает булеву операцию. Для того чтобы каждую из показанных на рис. 6.6.6 граней разрезать на части, нужно перестроить ее циклы и в соответствии с циклами изменить контуры, описывающие область определения параметров поверхности грани. На рис. 6.6.7 показаны две пересекшиеся грани (тонкими линиями со стрелками показано направление циклов граней исходных тел) и ребро пересечения. На рис. 6.6.8 показаны те части граней, которые войдут в объединение тел.

Рис. 6.6.7. Исходные грани тела

Рис. 6.6.8. Обрезанные грани
Стрелками показано направление перестроенных циклов граней тел. Каждый цикл представляет собой список ребер в порядке их следования и список флагов ориентации этих ребер в цикле.
Из рисунка видно, что при принятой ориентации ребер пересечения () в циклы граней первого тела они войдут с отрицательным флагом, а в циклы граней второго тела они войдут с положительным флагом.
Старые ребра исходных тел, которые сохранятся в результирующем теле, войдут в перестроенные циклы, сохранив свои флаги. При перестройке циклов пересекшихся граней будем использовать следующий алгоритм.
Рассмотрим одну из двух пересекшихся граней, принадлежащих первому телу. Берем любое ребро пересечения рассматриваемой грани и начинаем с него составлять список ребер цикла. Ребро пересечения должно войти в цикл грани первого тела с отрицательным флагом, следовательно, цикл будет иметь направление, противоположное первому ребру. Для продолжения цикла среди ребер пересечения и среди старых ребер грани ищем все ребра, стыкующиеся с данным ребром в его начальной вершине. Среди найденных ребер выберем то, которое лежит слева от остальных (заворачивает влево на больший угол по сравнению с другими найденными ребрами, если смотреть вдоль цикла с наружной стороны грани). Выбранное ребро ставим в список цикла. Если выбранное ребро является старым, то оно сохраняет свой флаг в цикле. Если выбранное ребро есть ребро пересечения, то оно получит отрицательный флаг. Ребра пересечения обладают преимущественным правом по отношению к старым ребрам быть выбранными. То есть, если левее других оказались два совпадающих ребра, одно из которых является старым, а другое - ребром пересечения, то для продолжения цикла должно быть выбрано ребро пересечения.
Процесс перестроения цикла грани будем продолжать до тех пор, пока цикл не замкнется. На этом построение очередного цикла заканчивается. Если у рассматриваемой грани при построении цикла использованы не все ребра пересечения, то с любого из оставшихся ребер пересечения начинаем строить еще один цикл грани. Циклы перестраиваем до тех пор, пока не используем все ребра пересечения. Таким способом мы построим в общем случае несколько новых циклов рассматриваемой грани первого тела.

Поиск стыкующихся ребер и определение угла поворота в точке стыка удобно выполнять по двухмерным кривым ребер грани. При этом можно работать даже с такими ребрами, которые в пространстве стянуты в точку (например, ребро в вершине конуса или полюсе сферы). На рис. 6.6.9 показано, что с новым ребром В А в точке А стыкуются несколько ребер. В данном случае для продолжения цикла, начатого с ребра пересечения В А, следует выбрать ребро АС.
Вновь построенные циклы рассортируем по группам, каждая из которых состоит из внешнего цикла и входящих в него внутренних циклов. У рассматриваемой грани могут остаться нетронутыми один или несколько старых циклов. Нетронутыми мы будем называть старые циклы грани, ни одно ребро которых не вошло в перестроенные циклы. Среди старых нетронутых циклов отберем те, которые необходимо включить в состав описания перестроенной грани. Ими являются старые внутренние циклы грани, лежащие внутри новых внешних циклов. Еще нужно определить, не потребуется ли включить в результат старый внешний цикл грани, если он остался нетронутым. Это необходимо сделать, если для некоторых новых внутренних циклов не найден новый внешний цикл и они лежат внутри старого внешнего цикла. Сортировку циклов удобно выполнять с помощью двухмерных контуров, соответствующих каждому циклу.
Если в результате сортировки внешних циклов получилось больше одного, то это означает, что из исходной грани в результате операции образовалось несколько граней. На рис. 6.6.10 а - 6.6.13 а приведены варианты исходных граней первого тела.
На рис. 6.6.10 б-6.6.13 б. приведены грани с добавлением ребер пересечения (ребра пересечения выделены). На рис. 6.6.10 в-6.6.13 в приведены грани, которые получились в результате операции.

Рис. 6.6.10. Исходная грань (а), грань с. добавлением ребер пересечения (б), результат операции (б)

Рис. 6.6.11. Исходная грань (а), грань с добавлением ребер пересечения (б), результат операции (в)

Рис. 6.6.12. Исходная грань (а), грань с добавлением ребер пересечения (б), результат операции (в)

Рис. 6.6.13. Исходная грань (а), грань с добавлением ребер пересечения (б), результат операции (в)
На рис. 6.6.10 грань с двумя циклами была разрезана и получилась одна грань с одним циклом. На рис. 6.6.11 грань с двумя циклами дала две грани. В примере, приведенном на рис. 6.6.12, потребовалось использовать старый внешний и внутренний циклы. На рис. 6.6.13 из одной грани получено две грани, причем для одной из них потребовалось использовать старый внешний цикл.
Описанное перестроение циклов выполняется для каждой пересекшейся грани первого тела.
С пересекшимися гранями второго тела поступим аналогично тому, как мы поступили с гранями первого тела, но с одной небольшой разницей. Ребра пересечения должны войти в перестроенные циклы граней второго тела с положительным флагом (в перестроенные циклы граней первого тела они вошли с отрицательным флагом). В этом состоит отличие перестроения циклов граней второго тела. Все остальные действия над гранями первого и второго объединяемых тел одинаковы.
Мы перестроили пересекшиеся грани объединяемых тел. Все их включим в оболочку результирующего тела. Для получения результирующего тела остается к этим граням в оболочку тела добавить не пересекшиеся в операции грани, которые топологически связаны с пересекшимися гранями. Для этого будем брать последовательно ребра, входящие в оболочку нового тела, и включать в оболочку смежные грани ребер (если они там отсутствуют). Продолжив эти действия для ребер всех добавленных граней, получим оболочку результирующего тела.
Пересечение тел.
Коротко суть булевой операции пересечения тел можно описать следующим образом: нужно найти линии пересечения тел, удалить ту часть первого тела, которая не попала внутрь второго, и ту часть второго тела, которая не попала внутрь первого, а из всего остального построить новое тело.
Эта операция имеет много общего с операцией объединения тел. Вернемся к рис. 6.6.6. На нем приведены пересекающиеся грани: одна грань первого тела и две грани второго тела. Грани режут друг друга, так что в результирующую оболочку войдут только части этих граней.
В пересечение тел войдет часть грани первого тела, лежащая внутри второго тела, и часть грани второго тела, лежащая внутри первого тела (рис. 6.6.14) (в объединение тел вошла часть грани первого тела, лежащая вне второго тела, и часть грани второго тела, лежащая вне первого тела).

Рис. 6.6.14. Исходные грани

Рис. 6.6.15. Перестроенные грани пересечения тел
В этом и состоит основное отличие операций объединения и пересечения тел.
Операцию разобьем на три этапа. Первый и второй этапы операции пересечения тел полностью совпадают с соответствующими этапами операции объединения тел.
Третий этап операции пересечения тел выполняется аналогично третьему этапу операции объединения тел, но имеет одно отличие в том, с каким флагом входят в циклы ребра пересечения. Ребра пересечения входят в перестроенные циклы граней первого тела с положительным флагом, а в перестроенные циклы граней второго тела - с отрицательным флагом (в объединении тел флаги ребер пересечения в циклах имеют противоположное значение). Все остальные действия над гранями обоих тел в обеих операциях одинаковы.
Разность тел.
Коротко суть булевой операции вычитания тел можно описать следующим образом: нужно найти линии пересечения тел, удалить ту часть первого тела, которая попала внутрь второго, и ту часть второго тела, которая не попала внутрь первого, а из всего остального построить новое тело.
Булева операция вычитания тел сводится к булевой операции пересечения уменьшаемого тела и вывернутого наизнанку вычитаемого тела. Вывернутое наизнанку тело мы получим из исходного тела путем переориентации направлений нормалей граней и направлений циклов граней. Переориентация направления нормали грани производится изменением признака совпадения нормали поверхности и нормали ее грани. Переориентация направления цикла грани производится перестроением списка ребер (изменением на обратный порядок следования ребер в списке) и заменой на противоположные флагов ребер в списках. Для вывернутого тела внутренним объемом является часть пространства, находящаяся вне его оболочки. Поэтому при пересечении уменьшаемого тела и вывернутого наизнанку вычитаемого тела результирующая оболочка будет содержать ту часть объема уменьшаемого тела, которая лежит вне вычитаемого тела.
Пересекающиеся ребра.
Наиболее трудоемким и требующим определенной точности в процессе выполнения булевых операций является построение ребер пересечения. Ребра пересечения не должны иметь выступающих за пределы грани частей, они должны обязательно стыковаться или друг с другом или со старыми ребрами граней. При корректном выполнении операции пересечения поверхностей эти условия обеспечиваются. Ребра пересечения не должны пересекать друг друга вне крайних точек.
В большинстве случаев новые ребра не пересекают друг друга, но в некоторых частных случаях это возможно. На рис. 6.6.16 показаны два цилиндрических тела одинакового диаметра, оси которых пересекаются - крест из цилиндров. При булевом объединении этих тел возможна ситуация, когда будут построены всего два замкнутых ребра пересечения. Такие ребра имеют две точки пересечения: А и В, по крайней мере, одна из которых не будет совпадать с вершинами ребер, а будет лежать где-то на ребре. Точки пересечения ребер лежат в точках касания цилиндров. Эти ребра должны быть разрезаны в точках А и В и у их частей должна быть уточнена ориентация, так как при прохождении точки касания поверхностей в данном случае векторное произведение нормалей к ним, по которому ориентируются новые ребра, меняет свое направление на противоположное. Обнаружить пересечение новых ребер можно по пересечению кривых на поверхностях, из которых состоит линия пересечения.

Рис. 6.6.16. В точках А и В нормали граней совпадают
Совпадающие ребра.
Описанный алгоритм выполнения булевых операций работает корректно, если ребра пересечения не совпадают с ребрами исходных тел. В противном случае он нуждается в уточнении. Рассмотрим примеры.
В булевых операциях возможен случай, когда какая-либо грань одного тела пересекает другое тело по его ребру. Возможен также случай, когда при построении ребер пересечения граней одного тела с гранями другого тела мы получим два новых ребра, совпадающих в пространстве друг с другом и с ребром одного из тел. Все ребра являются разными, так как в них стыкуются разные грани. На рис. 6.6.17 приведены два тела, при выполнении булевой операции над которыми, ребра пересечения совпадут с ребрами меньшего тела. Следуя общему алгоритму, мы в данном случае получим восемь ребер пересечения, половина из которых должна быть опущена (или не должна быть построена).
Правило для ребер пересечения.
При наличии ребер пересечения, совпадающих с ребрами граней исходных тел, и в некоторых других случаях будем выполнять следующую проверку. Построим в плоскости каждой из двух пересекаемых граней по два вектора, ортогональные ребру пересечения. На рис. 6.6.18 это векторы для грани с нормалью и векторы для грани с нормалью . Векторы поворачивают влево от ребра пересечения в соответствующих плоскостях, а векторы поворачивают вправо от ребра пересечения в соответствующих плоскостях.

Рис. 6.6.17. Совпадение ребер пересечения с ребрами меньшего тела

Рис. 6.6.18. Пересечение граней

Рис. 6.6.19. Пересечение граней по ребру
Если грань не имеет продолже ния за ребро пересечения (ребро пересечения частично или полностью совпадает с ребром тела), то соответствующий вектор положим равным нулю (рис. 6.6.19). Используя векторы и нормали мы можем определить, будет ли данное ребро пересечения использовано в операции или оно должно быть опущено. Обратим внимание на следующее обстоятельство.
В операции объединения тел грань первого тела мы сможем перестроить, еслиона имеет продолжение справа от ребра пересечения вне второго тела, а грань второго тела мы сможем перестроить, если она имеет продолжение слева от ребра пересечения вне первого тела.
Таким образом, в булевой операции объединения тел для ребра пересечения должны быть выполнены условия
В противном случае рассматриваемое ребро пересечения в булевой операции объединения тел строить не следует (если оно построено, то должно быть опущено).
В булевой операции пересечения тел грань первого тела мы сможем перестроить, если она имеет продолжение слева от ребра пересечения внутрь второго тела, а грань второго тела мы сможем перестроить, если она имеет продолжение справа от ребра пересечения внутрь первого тела. Таким образом, в булевой операции пересечения тел для ребра пересечения должны быть выполнены условия
В противном случае рассматриваемое ребро пересечения в булевой операции пересечения тел строить не следует (если оно построено, то должно быть опущено).
Как уже было сказано, ребра пересечения обладают преимущественным правом по отношению к старым ребрам тела быть включенными в перестраиваемый цикл.
То точка принадлежит внутреннему пространству тела. В противном случае - нет.
Перекрывающиеся грани.
В булевых операциях довольно часто можно встретить случаи частичного совпадения некоторых граней двух исходных тел. На рис. 6.6.20 приведены два тела, некоторые грани которых частично перекрывают друг друга.

Рис. 6.6.20. Совпадающие грани тел

Рис. 6.6.21. Объединение тел
В данном случае не все ребра пересечения граней войдут в булев результат; некоторые ребра должны быть опущены (или не должны строиться). Результат объединения тел приведен на рис. 6.6.21.
Аналогичная ситуация возникает при выполнении булевой операции над двумя соосными цилиндрами одинакового радиуса и еще во многих случаях. Грани могут перекрываться полностью, частично или всего лишь по одной линии.. Нормали частично перекрывающихся граней должны быть одинаково направлены в общих точках. Перекрывающимися являются грани, которые можно перенести на одну общую поверхность. Таких граней может быть больше двух. При наличии у тел-операндов перекрывающихся граней все ребра пересечения этих граней должны быть проверены на предмет присутствия их в булевом результате. В операции объединения тел нам потребуются только те ребра пересечения перекрывающихся граней, смежные грани которых имеют продолжение вне одного из тел. В операции пересечения тел нам потребуются только те ребра пересечения перекрывающихся граней, смежные грани которых имеют продолжение внутрь одного из тел.
Циклы перекрывающихся граней тел должны быть перестроены по несколько иному алгоритму, чем для остальных граней. Прежде всего, все ребра этих граней должны быть приведены к одному общему носителю (к поверхности одной из перекрывающихся граней). В операции объединения тел старые ребра перекрывающихся граней первого тела, лежащие внутри второго тела, и старые ребра перекрывающихся граней второго тела, лежащие внутри первого тела, не войдут в результирующее тело. В операции пресечения тел старые ребра перекрывающихся граней первого тела, лежащие вне второго тела, и старые ребра перекрывающихся граней второго тела, лежащие вне первого тела, также не войдут в результирующее тело.
Построение некоторого цикла перекрывающихся граней начнем с ребра, которое точно должно войти в результат. Для продолжения цикла среди ребер пересечения и среди старых оставшихся ребер грани найдем все ребра, стыкующиеся с данным ребром в его соответствующей вершине. Среди найденных ребер выберем то, которое лежит справа от остальных (заворачивает вправо на больший угол по сравнению с другими найденными ребрами, если смотреть вдоль цикла с наружной стороны грани). Выбранное ребро ставим в список цикла. Отличие алгоритма состоит в том, что при продолжении цикла мы выбираем самое правое (а не самое левое) ребро.
Тела с несколькими оболочками.
Если какое-либо из тел-операндов имеет пустоты и, соответственно, описывается несколькими оболочками, то нетронутые операцией внутренние (внешние) оболочки должны быть проверены на вхождение в оболочку булева результата. В общем случае результирующее тело также может иметь несколько оболочек.
Дерево построения тел.
Булевы операции над телами показывают необходимость привлечения топологических понятий для построения тел.
Рассмотренные в предыдущих параграфах тела будем называть простыми, в отличие от тел, полученных в результате операций, которые будем называть сложными. Структура данных простых тел содержит минимум информации, по которой могут быть построены все грани тела. В структуре данных тела, полученного в результате булевой операции, положим структуры данных исходных тел и тип булевой операции. Оболочки тела всегда могут быть построены по этой информации. Таким образом, структура данных тела, полученного в результате многократного выполнения булевых операций, будет содержать дерево построения. Результирующее тело находится в корне дерева, а его ветви начинаются в простых телах.
Пример дерева приведен на рис. 6.6.22. В узлах дерева находятся тела. Дерево имеет несколько ярусов. Операции между телами обозначены соответствующими знаками. Операции выполняются между телами одного яруса.

Рис. 6.6.22. Дерево построения тела
Структура данных тела в виде дерева построения может быть использована для всех тел - как для тел, полученных в результате некоторой операции, так и для простых тел.
Конъюнкция или логическое умножение (в теории множеств – это пересечение)
Конъюнкция является сложным логическим выражением, которое истинно в том и только том случае, когда оба простых выражения являются истинными. Такая ситуация возможно лишь в единственном случае, во всех остальных случаях конъюнкция ложна.
Обозначение: &, $\wedge$, $\cdot$.
Таблица истинности для конъюнкции
Рисунок 1.
Свойства конъюнкции:
- Если хотя бы одно из подвыражений конъюнкции ложно на некотором наборе значений переменных, то и вся конъюнкция будет ложной для этого набора значений.
- Если все выражения конъюнкции истинны на некотором наборе значений переменных, то и вся конъюнкция тоже будет истинна.
- Значение всей конъюнкции сложного выражения не зависит от порядка записи подвыражений, к которым она применяется (как в математике умножение).
Дизъюнкция или логическое сложение (в теории множеств это объединение)
Дизъюнкция является сложным логическим выражением, которое истинно практически всегда, за исключением, когда все выражения ложны.
Обозначение: +, $\vee$.
Таблица истинности для дизъюнкции

Рисунок 2.
Свойства дизъюнкции:
- Если хотя бы одно из подвыражений дизъюнкции истинно на некотором наборе значений переменных, то и вся дизъюнкция принимает истинное значение для данного набора подвыражений.
- Если все выражения из некоторого списка дизъюнкции ложны на некотором наборе значений переменных, то и вся дизъюнкция этих выражений тоже ложна.
- Значение всей дизъюнкции не зависит от порядка записи подвыражений (как в математике – сложение).
Отрицание, логическое отрицание или инверсия (в теории множеств это отрицание)
Отрицание - означает, что к исходному логическому выражению добавляется частица НЕ или слова НЕВЕРНО, ЧТО и в итоге получаем, что если исходное выражение истинно, то отрицание исходного – будет ложно и наоборот, если исходное выражение ложно, то его отрицание будет истинно.
Обозначения: не $A$, $\bar{A}$, $¬A$.
Таблица истинности для инверсии

Рисунок 3.
Свойства отрицания:
«Двойное отрицание» $¬¬A$ является следствием суждения $A$, то есть имеет место тавтология в формальной логике и равно самому значению в булевой логике.
Импликация или логическое следование
Импликация - это сложное логическое выражение, которое истинно во всех случаях, кроме как из истины следует ложь. То есть, данная логическая операция связывает два простых логических выражения, из которых первое является условием ($A$), а второе ($A$) является следствием условия ($A$).
Обозначения: $\to$, $\Rightarrow$.
Таблица истинности для импликации

Рисунок 4.
Свойства импликации:
- $A \to B = ¬A \vee B$.
- Импликация $A \to B$ ложна, если $A=1$ и $B=0$.
- Если $A=0$, то импликация $A \to B$ истинна при любом значении $B$, (из лжи может следовать истинна).
Эквивалентность или логическая равнозначность
Эквивалентность - это сложное логическое выражение, которое истинно на равных значениях переменных $A$ и $B$.
Обозначения: $\leftrightarrow$, $\Leftrightarrow$, $\equiv$.
Таблица истинности для эквивалентности

Рисунок 5.
Свойства эквивалентности:
- Эквивалентность истинна на равных наборах значений переменных $A$ и $B$.
- КНФ $A \equiv B = (\bar{A} \vee B) \cdot (A \cdot \bar{B})$
- ДНФ $A \equiv B = \bar{A} \cdot \bar{B} \vee A \cdot B$
Строгая дизъюнкция или сложение по модулю 2 (в теории множеств это объединение двух множеств без их пересечения)
Строгая дизъюнкция истинна, если значения аргументов не равны.
Для электроники это означает, что реализация схем возможна с использованием одного типового элемента (правда это дорогостоящий элемент).
Порядок выполнения логических операций в сложном логическом выражении
- Инверсия(отрицание);
- Конъюнкция (логическое умножение);
- Дизъюнкция и строгая дизъюнкция (логическое сложение);
- Импликация (следствие);
- Эквивалентность (тождество).
Для того чтобы изменить указанный порядок выполнения логических операций, необходимо использовать скобки.
Общие свойства
Для набора из $n$ логических переменных существует ровно $2^n$ различных значений. Таблица истинности для логического выражения от $n$ переменных содержит $n+1$ столбец и $2^n$ строк.
Цель работы : Изучение основных приемов размножения объектов с помощью функции «массив»; изучение технологии создания объектов с помощью булевых операций.Булевы операции
Булевы операции (часто их называют логическими) пришли в 3D графику из математики, точнее, из булевой алгебры (названной в честь ее создателя - Джорджа Буля) и основаны на понятиях объединения, пересечения и исключения. В 3D Studio Max существует три основных булевых операции, результаты применения которых показаны на рисунке 1:- Объединение (соединение объектов в один).
- Пересечение (в булевый объект входят только общие части исходных объектов).
- Исключение (вырезание).
Объединение . Результирующий объект, полученный объединением двух объектов, содержит все точки двух исходных объектов-операндов, за исключением дубликатов общих точек.
Пересечение . Объект, полученный в результате операции пересечения, содержит только те точки, которые являются общими для двух исходных объектов.
Вычитание . Объект, который получается в результате выполнения этой логической операции, содержит только точки первого объекта за исключением тех точек, которые являются общими для двух объектов. Операция логического вычитания одного объекта из другого является некоммутативной. Другими словами, разность А - В – это не то же самое, что разность В - А .
Использование булевых операций
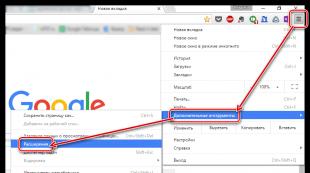
Булевы операции в 3D Studio Max можно выполнять только над двумя объектами. Эти объекты должны пересекаться, т.е. содержать общие точки. Булевы операции позволяют создавать составные объекты, выполняя операции объединения, вычитания и пересечения частей двух объектов. К булевым операциям можно получить доступ следующим образом (рис. 2).
 Рисунок 1. Получение доступа к булевым операциям.
Рисунок 1. Получение доступа к булевым операциям.
Вначале требуется выделить объект, который будет участвовать в операции первым, т.е. будет объектом А в одном из окон проекций. Затем необходимо щелкнуть на вкладке Create (Создать) панели команд и на кнопке Geometry (Геометрия). В раскрывающемся списке под этой кнопкой выберите режим Compound Objects (Составные объекты). В ветви Object Type (Тип объекта) щелкните на кнопке Boolean (Булевы операции). В панели команд появится свиток с операциями, которые можно выполнять применительно к объектам. Булевы операции упоминают в сочетании с еще одним термином – операндом. Операнд – это переменная, присвоенная выбранным объектам во время выполнения операции. Операнд во многом подобен переменным, используемым в алгебре при составлении уравнений. Например, переменные А и В можно использовать для представления двух объектов, к которым будет применена булева операция.
- Union (Объединение). Эта функция объединяет два объекта в один и удаляет перекрывающиеся или накладывающиеся области.
- Intersection (Пересечение). Эта функция создает объект, который содержит только перекрывающиеся области обоих объектов.
- Substraction (Вычитание [А-В]) и Substraction (Вычитание [В-А]). Эта операция позволяет удалить один из объектов и любые перекрывающиеся области объектов. При операции данного типа выбор А-В приводит к вычитанию объекта В из объекта А, а В-А – к вычитанию объекта А из В.
- (Добавлена в старших версиях программы) Cut (Разрез). Эта функция рассекает операнд А операндом В. Она работает аналогично модификатору Slice (Сечение), который позволяет рассечь каркас. Обратите внимание на наличие четырех вариантов вырезания: Refine (Уточнение), Split (Расщепление), Remove Inside (Удаление внутри), Remove Outside (Удаление снаружи).
- Операция Refine добавит в операнд А новые вершины и ребра в местах его пересечения с операндом В. Операция Split рассечет объект на два куска. Операции Remove Inside и Remove Outside удалят из операнда А все грани, которые находятся, соответственно, внутри и снаружи операнда В.
Объекты типа Boolean (Булевы) создаются за счет применения к оболочкам двух трехмерных тел операций булевой алгебры. Оболочки исходных тел, участвующих в булевой операции – операнды (operands ), обязательно должны пересекаться. Из двух объектов, участвующих в булевой операции, один должен быть выделен до ее начала (операнд А), а другой (операнд В) указывается в ходе операции. После выделения одного из объектов, необходимо выбрать переключатель той операции, которую нужно выполнить. После того, как эти элементы выбраны, следует выбрать переключатель одного из типов копирования:
- Move (Переместить) – в этом случае в логической операции участвует сам объект. Он пропадет после выполнения операции.
- Сору (Копия) – в операции участвует копия второго объекта. Сам объект остается при этом без изменения.
- Reference (Ссылка) – в операции принимает участие ссылка на второй объект.
- Instance (Экземпляр) – в операции принимает участие экземпляр второго объекта.
Моделирование с помощью булевых операций - это общая и часто используемая методика. Булевы операции весьма близки к традиционным методам создания скульптур и моделирования. В 3D Studio MAX булево моделирование становится еще более полезным за счет реализации составного булевого объекта. В отличие от модификатора моделирования составной булев объект состоит из двух объектов, называемых операндами, которые представляют булеву операцию. Эти операнды остаются в виде объектов столько, сколько необходимо, и обеспечивают возможность доступа к своим параметрам и стекам модификаторов.
Составной булев объект отличается от многих программных понятий булевых операций, поскольку он не изменяет на постоянной основе формы, определяющие геометрию операндов. Позже эту геометрию можно перемещать, переопределять и производить обмен. Поскольку операнды остаются объектами, с ними можно взаимодействовать как с любым другим объектом. Для них можно даже выполнять анимацию, создавая поразительные эффекты. Затененные видовые окна 3DS МАХ позволяют видеть результат булевой операции в случае изменения операндов. Последнее является преимуществом интерактивного режима работы и вызывает ощущение, что один объект используется для вырезания другого. Оставаясь весьма полезными и развлекательными, сложность булевых операций может возрасти при вложении их одна в другую. В этой главе приводится информация, позволяющая упростить использование булевых операций. Внимание уделяется:
- Основам булевых операций и способам увеличения их интерактивности
- Работе со вложенными булевыми объектами
- Использованию различных булевых операций для создания скульптур и моделирования
- Соображениям, которые необходимо учитывать для успешного выполнения булевых операций
Основы булевых операций
Как и для многих терминов компьютерной графики, термин "булева" происходит от имени человека, который ввел это понятие (в данном случае это Джордж Буль). В математике термин "булева" появился для обозначения операции сравнения между множествами; в 3D Studio MAX подобное сравнение выполняется между геометрическими объектами. Хотя булева операция выглядит во многом похожей на модификатор, она находится на панели Create, а не на панели Modify, поскольку выполняется определение нового объекта из двух существующих (аналогично созданию loft- или morph-объектов). Булева операция в 3D Studio MAX выполняется путем создания булевого составного объекта из двух существующих объектов, которые называются операндами , при этом выполняются следующие шаги:
- Выберите начальный объект для булевой операции.
- Выберите Compound Objects (составные объекты) из списка выборки Geometry в панели Modify и затем щелкните на кнопке Boolean.
Выбранный объект становится операндом А для составного булевого объекта. Теперь можно выбрать операнд В. - Выберите требуемый тип операции (Operation:).
- Щелкните на Pick Operand В (выбрать операнд В) и затем выберите второй объект.
Объекты сравниваются для определения их действительности (с точки зрения выполнения булевой операции) и, если они действительны, булева операция выполняется.
Теперь можно изменить тип операции и увидеть различные булевы результаты.
Типы операции подобны многим традиционным методам. Объединение соединяет объекты подобно работе с глиной; при вычитании один объект вырезается из другого, как в скульптуре; пересечение оставляет то, что должно было бы быть вырезано или выбито из вычитания. Объединение и вычитание всегда возвращают одинаковый результат независимо от порядка выбора операндов. Предусмотрены две опции (А-В и В-А), поэтому при неправильном начальном выборе можно быстро переключиться. Результаты этих основных операций показаны на рисунке 11.1.
ПРЕДУПРЕЖДЕНИЕ Можно щелкнуть на кнопке Pick Operand В и выбрать другой Operand В произвольное количество раз. При выборе нового операнда В первоначальный операнд со сцены удаляется. При выборе в качестве операнда В неправильного объекта щелкните на кнопке Undo перед выбором другого операнда В.
Булевы выражения в качестве составных объектов
Чрезвычайная гибкость булевых операций в 3DS МАХ состоит в том, что объекты, содержащие булевы операнды, по-прежнему существуют как объекты. Каждый операнд сохраняет свой первоначальный стек Edit History (отредактировать историю) и его можно модифицировать из панели Command. Операнды можно даже трансформировать на уровне подобъекта. На рисунке 11.2 показан результат в Track View после создания булевого объекта.
Архитектура ссылок и экземпляров 3DS МАХ демонстрирует свою мощь при работе с булевыми объектами. При первом создании булевого составного объекта можно выбирать опцию перемещения, создания копии, экземпляра или ссылки объекта, выбранного в качестве операнда В. Опцией по умолчанию является Move (переместить) и кажется, что она создает явное действие, поскольку остается только булев результат. Оба объекта, выбранные для булевой операции, теперь являются операндами подобъектов. Остальные опции выполняют булев результат с копией, экземпляром или ссылкой на выбранный объект. Во всех трех случаях объект, выбранный для операнда В, остается без изменений, а булев результат получается с использованием нового объекта в качестве операнда. В таких случаях может показаться, что ничего не произошло, до тех пор пока не переместить или не скрыть один из этих двух объектов.
ПРИМЕЧАНИЕ Из объекта, выбранного в качестве операнда В, удаляется любая анимация трансформации, в то время как операнд А (первоначальный объект) оставляет анимацию трансформации. Если операнд А имеет анимацию трансформации, для нового статического операнда используется текущее расположение кадра, его позиция и масштаб.
Хотя можно сделать копию, экземпляр или ссылку операнда В, для операнда А такой опции не существует (объект выбирается после щелчка на Boolean). Гибкий метод обхода такого ограничения заключается в кло-нировании до экземпляров всех объектов, которые предполагается использовать в булевых операциях. После этого следует использовать опцию по умолчанию Move для выборок операнда В, обеспечив возможность модификации любых объектов в рамках булевого объекта и сохранения их отношений.
СОВЕТ Чтобы создать экземпляр из объекта, который уже является операндом, войдите в Track View. Скопируйте определение объекта операнда (указано синим кружком) в буфер обмена и вставьте его в определение другого объекта в виде экземпляра. Этот метод можно также использовать в обратном порядке, полностью переопределяя геометрию операндов, например путем изменения всех квадратных отверстий на круглые.
После создания булевого объекта можно заменить операнд В из панели Modify булевого объекта с теми же самыми выборами, предоставленными при создании. Используйте эту опцию осторожно, поскольку она уничтожает со сцены первоначально выбранный операнд В. Уничтожение оригинала может создать проблему при первоначальном использовании опции Move и представлении геометрии, которая уже не существует в виде отдельного объекта. Выбор другого операнда - это то же самое, что и замена определения объекта операнда в Track View, за исключением случая, когда необходимо сделать ссылку, которая не присутствует в Track View.
После создания булевого объекта можно вернуться к каждому Modifier Stack операнда на панели Modify (см. рис. 11.3). При первом входе в панель Modify булевого объекта не выбран ни один из операндов, поэтому Modifier Stack показывает только Boolean. Для модификации стека конкретного операнда необходимо произвести выбор из списка Operands. Теперь выбранный операнд отображает свой стек. Можно настроить любой модификатор в стеке или добавить новые модификаторы для оказания влияния на объект операнда перед булевой операцией. На параметры, с которыми можно выполнять анимацию, дополнительных ограничений не существует. Для трансформации операнда необходимо активизировать режим Sub-Object для булевого объекта. При таком подходе операнды можно считать подобными гизмо за тем исключением, что в отличие от гизмо, у операндов имеются собственные Modifier Stack.
Опции обновления
Опции Update (обновления) для булевых операций управляют тем, как фактически выполняются булевы вычисления. Для сложных объектов булевы вычисления могут занимать достаточно большое время. Эти вычисления замедляют редактирование других объектов, если они являются экземплярами или ссылками на булевы операнды. Если при моделировании возникают паузы, измените опцию Update. Опция Manually (вручную) является одним из наиболее консервативных методов и обеспечивает наибольшее управление вычислением операций. Такой режим наиболее пригоден для сложных моделей. Метод When Rendering (во время визуализации) не вычисляет операцию до тех пор, пока не будет выполнена окончательная визуализация, после чего производится возврат откорректированного результата на сцену. Метод When Selected (при выборе) несколько ненадежен в обновлении результата и на него не следует полагаться.
Для ускорения операций моделирования операнды должны быть простыми. После завершения булевых операций и модификаций возвратитесь к прежним определениям операндов и увеличьте их плотность. Если они являются экземплярами, увеличьте их сложность и затем вручную отрегулируйте результат.
СОВЕТ Длительные булевы вычисления можно завершить, нажав клавишу Escape во время отображения курсора ожидания. После такого завершения режим Update автоматически переходит в Manually, поэтому теперь можно точно управлять временем вычисления обновления (поскольку геометрия, по всей вероятности, является сложной).
Интерактивные булевы операции
При входе в режим Sub-Object булевого объекта операнды можно регулировать независимо друг от друга. В списке перечислены имена операндов, подходящих для перемещения, вращения или масштабирования. При манипуляции операндом на уровне подобъектов фактически выполняется интерактивная булева операция, поскольку при перемещении любого из операндов другой остается неподвижным, и по мере перемещения операнда отображается обновленный булев результат. Для несложных моделей или при использовании быстродействующих машин это часто выполняется в реальном времени.
ПРИМЕЧАНИЕ Для сложных булевых операций режим Update для булева выражения должен быть установлен в Manually, чтобы операнд можно было позиционировать без дополнительных задержек на вычисления. После помещения операнда на требуемое место щелкните на Update для просмотра нового результата.
Понимание опций Display (отображения) булевой операции является ключевым моментом при выполнении интерактивных изменений. Результат булевой операции показывает опция по умолчанию Result (результат). При изменении опции на Operands (операнды) отображаются оба операнда А и В так, как будто булевой операции не выполнялось. Полностью отображенный операнд скрывает булев результат, поэтому в некоторой степени приходится работать вслепую. На практике лучше всего является комбинация, при которой выбирается Result и активизируется опция Show Hidden Ops (показать скрытые операнды). При этом недостающие операнды отображаются в виде проволочных каркасов (но только в затененных видовых окнах) и обеспечивается информация о точном местонахождении операнда и о его текущем влиянии на булеву операцию.
ПРИМЕЧАНИЕ Помните, что операнд всегда можно присвоить другому контроллеру объекта или контроллеру уникального Path, Look At (посмотреть на) или Expression (выражение) для создания эффектов, подобных анимированным кусочкам сверла или ожогам лазера.
Вложенные булевы объекты
Для одного объекта можно выполнить любое число булевых операций, причем каждая операция создает собственный набор операндов, вложенных друг в друга. Единственным "пределом" является практичное количество операций, по которыми необходимо перемещаться.
После создания булевого объекта на той же самой геометрии можно выполнять дополнительные булевы операции путем выбора объекта в качестве операнда А для нового составного булевого объекта. Каждый раз при выполнении на объекте булевой операции фактически создается оригинал операнда нового булевого объекта. Таким образом определяется "булево дерево", состоящее из одиночных ветвей - весьма линейная прогрессия шагов. К каждой выполняемой булевой операции можно осуществить доступ позже, хотя применяемый для этого метод требует небольшой практики, поскольку все это происходит на панели Modify. Результаты выполнения трех последовательных булевых операций показаны на рисунке 11.4. Коробка вычитает сферу, затем цилиндр и, в конце концов, конус.
СОВЕТ Для более глубокого погружения в булево дерево продолжайте выбирать операнд А и затем перейдите к следующей булевой операции в стеке. Для продвижения вперед используется стек операнда В, но для продвижения назад по истории редактирования можно использовать только стек операнда А.
При выполнении нескольких булевых операций, одну за другой, следует соблюдать осторожность. После завершения операции и, таким образом, составного булевого объекта, необходимо выйти из диалога Boolean или последующий выбор заменит только что выполненную операцию и удалит объект со сцены. Хотя для этого требуются дополнительные щелчки на кнопках, необходимо выйти из списка Compound Objects (составные объекты) путем выбора геометрии другого типа (например, Path Grids) и затем вернуться к Compound Objects для определения следующего булевого объекта.
При навигации по булевому дереву в Track View необходимо помнить, что в нем отражаются только объекты с параметрами, с которыми можно выполнить анимацию. Если булев объект создан из необработанного каркаса или лоскута, показываются только трансформации операнда, поскольку у него нет параметров создания, которые нужно настраивать. Когда для этого же объекта задается модификатор, для модифицированного объекта создается новый вход. То, что у операнда такая же метка, что и у Transform (с голубым кружком модификатора вместо зеленого треугольника контроллера) может привести к замешательству. При глубоком погружении в дерево, изображенное ранее на рисунке 11.4, следите за голубыми кружками Operand. Только самый глубокий операнд А содержит определение объекта; определения всех других объектов находятся внутри предыдущих операндов В.
СОВЕТ При использовании в качестве операндов примитивов Track View перечисляет их параметры под общим заголовком Operand. Задани]е для примитива модификатора, например Material, перемещает параметры создания в сферу модифицированного объекта, расположенную под операндом, вместе с меткой, обозначающей тип объекта.
Булевы характеристики
При создании булевого объекта сохраняются сглаживающие группы и идентификаторы материалов отдельных объектов. К сожалению, проецирование (mapping) полностью удаляется и его необходимо применить после получения окончательного булевого результата. В случае, если объекту присвоено проецирование через модификаторы UVW, его можно восстановить. Если создается копия, но не экземпляр, первоначального объекта или модификатора, присвойте новый UVW Mapping после выполнения булевой операции, и для восстановления проецирования используйте функцию Acquire (приобрести) модификатора. Отметим, что эта операция не работает для процедурных присвоении проецирования.
Координаты проецирования удаляются, поскольку вершины булевого результата всегда объединены. При этом если имеется намерение после выполнения булевой операции разделить первоначальные операнды, для их отсоединения следует использовать Edit Mesh. Если операнд имеет уникальный материал или сглаживающие группы, это значительно помогает в выборке на уровне грани для отсоединения.
Идентификаторы материалов, вероятно, являются самым ценным инструментом при управлении окончательными результатами для поверхности булевого объекта. Задание для каждого операнда модификатора Material с отдельным идентификатором означает, что имеется гарантированный метод выбора граней после завершения булевых операций. Несмотря на то, что для подобъекта присвоения материала весьма полезно, сохранение операндов в виде выборок граней также имеет значение при выборке граней для присвоения сглаживающих групп и модификаторов UVW Mapping с целью восстановления утерянного покрытия.
Иногда булев результат содержит дефекты в виде петель и искажений. Эти дефекты часто вызваны тем, что аналогичные сглаживающие группы действуют друг на друга методами, которые не должны применяться, или вершины объединяются так, что сглаживание произойти не может. Если такого рода дефекты видны, примените модификатор Edit Mesh, выберите все вершины и выполните Weld Selected (объединить выбранные). Если дефекты не исчезают, необходимо проанализировать присвоения сглаживающих групп (перед булевой операцией или после нее).
В большинстве случаев гораздо проще выбрать критические области перед тем, как они станут частью булевой операции. Если известно, какая часть модели потребует уникального сглаживания (например, закругление на рисунке 11.5), присвойте этим граням уникальную сглаживающую группу или идентификатор материала так, чтобы после булевой операции у них оказалось корректное сглаживание.
Последнее обсуждение может оказаться таким, как будто необходимо проделать тщательные размышления и планирование перед переходом к выполнению булевой операции, хотя фактически Modifier Stack позволяет сделать этот процесс значительно менее структурированным. На практике общим приемом является быстрое создание булевых объектов и затем возвращение к предыдущему операнду в истории операндов с целью произвести при необходимости присвоения сглаживания и материала. Отметим, что это значительно проще сделать, если есть объекты-экземпляры перед тем, как они станут операндами.
Соображения по улучшению булевых операций
Булев код в 3DS МАХ очень обобщен и позволяет работать с произвольными поверхностями. Однако подобное обобщение означает, что не каждый объект образует действительный булев объект и что некоторые "действительные" результаты могут иметь артефакты (например, длинные грани планки) или содержать нежелательные результаты. Ниже приведен контрольный перечень, который поможет при поиске неисправностей и создании моделей, дружественных для булевых операций:
- Нормали для всей поверхности должны быть унифицированы без всяких ложных граней, указывающих в неправильном направлении. Нормали граней используются в определении направления поверхности и результирующего булевого объекта.
- Каркас должен быть построен правильно; это означает, что грани, совместно использующие ребро, должны совместно использовать две вершины, а ребро может совместно использоваться только двумя гранями. (Внутренние основные грани вершин объекта вращения для последнего правила являются типичным кошмаром.)
- Обеспечивайте объединение всех вершин. Может потребоваться объединение всех вершин вручную с помощью Edit Mesh даже для последовательных булевых операций.
- Копланарные грани, в особенности те, которые находятся внутри одного и того же объекта, причиняют беспокойство и их следует избегать. Одним из наихудших случаев являются копланарные грани, расположенные тыльными сторонами друг к другу (они легко создаются путем построения примитива с нулевой высотой).
- Булевы операции надежно работают только с одиночными элементами. Если любой из операндов состоит из множества элементов (например, Teapot или Hedra), в каждый момент времени может успешно работать только один элемент.
- Если операция не удается, выключите опцию Optimize Result (оптимизировать результат) в нижней части свитка так, чтобы последний проход, контролирующий компланарные грани, не вычислялся. Включенная опция Optimize Result часто может быть причиной получения некорректных результатов.
- Если операция по-прежнему не удается или создает расщепленные грани, попытайтесь выполнить небольшую настройку операндов.
- Изменяйте уровень детализации операнда, в особенности возле области, которая является локальной для действующей булевой операции.
Не допускайте того, чтобы этот контрольный перечень испугал вас и заставил избегать булевых операций. Большинство этих опций работает с первой попытки, в особенности если геометрия подчиняется первым трем правилам, а это, скорее всего, будет выполняться при создании геометрии в рамках 3DS МАХ.
При выполнении анимации с булевыми операциями можно столкнуться с внезапной "вспышкой" или "подрагиванием" в одном или двух кадрах - вероятнее всего, это результат того, что булева операция не выполнилась, или в этом одном кадре созданы странные грани. Учитывая вред и влияние булевой операции с анимацией, стоит потратить время на продвижения от кадра к кадру для анализа булевого результата. Если возникает состояние, при котором происходит ошибка визуализации, немного отрегулируйте геометрию этого кадра с целью улучшения результата и продолжите работу. Если требуется произвести множество настроек, лучше присвоить дорожке положения операнда контроллер Linear и настроить практически каждый кадр.
Вырезание при помощи булевого вычитания
Булевы операции вычитания - это наиболее используемые типы операции и поэтому являются операциями по умолчанию. Операции вычитания можно рассматривать как операции "откусить кусок от", "создать скульптуру", "вырезать", "удалить из", "просверлить", "отштамповать" - выбирайте аналогию с наибольшим смыслом.
Успешное создание скульптуры посредством булевой операции начинается с понимания того, какой должна быть конечная вычитаемая форма. Это приводит к мысли о том, какая геометрия потребуется для выполнения того или иного шаблона. После частого выполнения операций вычитания объект имеет мало сходства с окончательным результатом; объект просто принимает форму режущего ножа, который делит поверхность на пластины. Второй операнд можно считать "стамеской" или "кусочком фасонной фрезы", которая создает конкретный "желобок" на первом объекте. Операция булевого вычитания также является хорошим, если не основным, методом для создания закруглений и углублений на существующих объектах.
ПРИМЕЧАНИЕ Может оказаться полезным обеспечить выбор "режущих инструментов" в виде кривых Безье, которые для целей операций булевого вычитания можно вытягивать, выполнять с ними операцию лофтинга или вращать. Более сложные булевы режущие формы при необходимости можно сохранить в виде каркаса или в слитом виде.
Создание посредством булевого пересечения углублений в новых объектах
Булево пересечение создает объект, который иначе следовало бы "вырезать" при помощи операции булевого вычитания. Результат иногда трудно визуализировать, но он может создать геометрию, которую иначе трудно промоделировать (см. рис. 11.6). Здесь второй операнд действует в качестве разреза в шести направлениях.
Одно из основных применений булевого пересечения заключается в восстановлении того, что "отбирается" при операции булевого вычитания. Иногда может потребоваться использовать часть, которая "упала на пол" в анимации. Может потребоваться показать часть, которая отштампована, например, из металлической заготовки. Для этого скопируйте первоначальные объекты и выполните две булевы операции, создав таким образом "разрезанный" объект и то, что было "вырезано".
Моделирование при помощи булевого объединения
Операция булевого объединения объединяет два операнда и удаляет любую перекрывающуюся геометрию. Перед выполнением объединения следует тщательно рассмотреть саму необходимость создания объединения. Если основное пересечение можно видеть, использование объединения является правильным выбором. Если пересечение двух объектов скрыто, лучше разрешить объектам просто пересечься. В общем случае используйте объединение, если необходимо продолжить сглаживающие группы через сочленение. В этом случае булево объединение является просто первым шагом в более сложной последовательности моделирования.
Булево объединение более всего используется для объектов, которые должны выглядеть "сплошными". Поверхность закрыта, исследовать внутреннюю структуру не требуется, поэтому объект имеет толщину всего в одну грань. Во многих случаях булево объединение выполняется для достижения эффекта вычитания. Один операнд накладывается на другой, что разрешает использовать последний для других целей, не нанося вреда операнду, который накладывается. Такая операция может оказаться полезной, когда накладываемый объект имеет конкретную форму, которую необходимо связать с другим объектом.
Булево объединение также применяется для создания двух элементов, которые можно отделить от других при помощи функции Detach в Edit Mesh. Если операция булевого объединения используется для редактирования объектов там, где геометрия перекрывается однократно, каркас не образуется. Когда результирующие объекты разделяются, в каркасе появляется отверстие в месте соединения объектов. Для эффективного использования этого метода лучше всего присвоить каждому операнду уникальный идентификационный номер материала (Material ID#) так, чтобы можно было легко выбирать грани по Material ID# из Edit Mesh при выполнении отсоединения.